Resulta extraño comenzar con el comentario de que los orígenes de la robótica se pierden en la noche de los tiempos, cuando realmente es una tecnología que oficialmente posee cincuenta años. Y es que desde siempre, la humanidad ha intentado imitar mediante creaciones artificiales ciertos aspectos de nuestro cuerpo, especialmente a lo que a la movilidad y procesos mentales se refiere. Algunos autores llevan el origen hasta el inicio de la Creación, teniendo en cuenta que Adán y Eva fueron los primeros seres artificiales creados a partir del barro. En todo caso, las razones exactas por las que nos atrae la creación de seres artificiales similares a nosotros, se desconocen. Aunque si bien es cierto que ha existido, en una primera instancia, una motivación religiosa y lúdica, finalmente se han impuesto las cuestiones más pragmáticas.
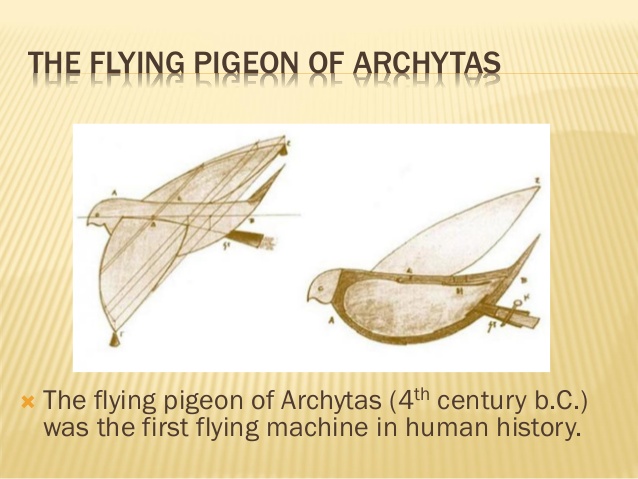
En efecto, se habla de ciertos artefactos que realizaban los antiguos egipcios que dotaban de movimientos simples a las estatuas de sus dioses, con el fin de impresionar a sus devotos, pero de los primeros inventos robóticos de los que se posee realmente constancia se deben al filósofo griego Archytas (428 a.C. – 347 a.C.), perteneciente a la escuela pitagórica y amigo de Platón (427 a.C.- 347 a.C.). Acuñó el término “Automaton” que denota cualquier ingenio con movimientos propios y espontáneos. No en vano, Archytas fue el precursor en la fabricación de este tipo de artefactos entre los que destacó un juguete en forma de una paloma que volaba autopropulsada mediante vapor de agua.
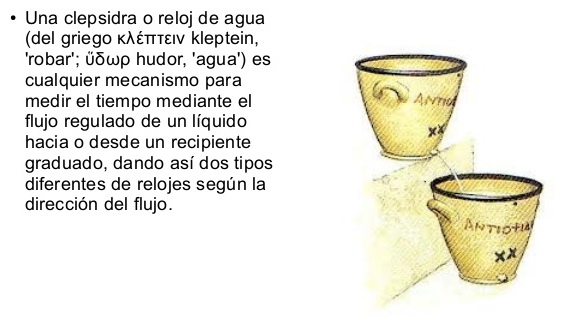
Esta tecnología de desarrollar automatismos basados en el agua, fue tomada por el matemático griego Ktesibios de Alejandría (285 a.C.–222 a.C.), quien desarrolló multitud de inventos entre los que destacar la creación del primer reloj de agua, «Clepsidra», y fue el padre de un tratado de neumática.
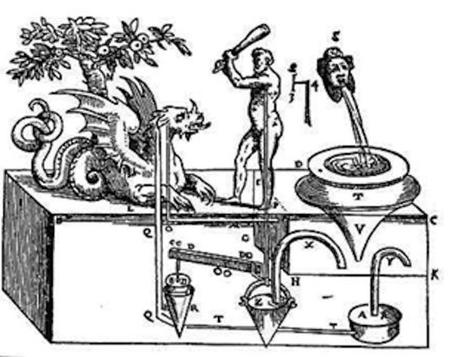
Aunque no ha sobrevivido nada de su obra hasta nuestros días, Herón de Alejandría (70 A.C. – 10 a.C) recogió su obra e ingenió a partir de ella, un gran número de máquinas basadas en el empleo del vapor. Así, se considera el padre de la hidráulica, empleando esta técnica para el desarrollo de numerosos automatismos, desde un dispensador de vino hasta la apertura automática de puertas de templos. Escribió el primer tratado de automatismos de la historia.
En lo que a la robótica se refiere, y a otras ciencias, existe un completo vacío desde la época de Herón de Alejandría hasta el Renacimiento. Los romanos, si bien eran ingenieros excepcionales, no resultaban buenos científicos. Puede que uno de los motivos fuese su sistema numérico, el cual complicaba cualquier tipo de operación matemática, además de desconocer el número cero y los decimales. Aunque utilizaron el saber matemático de los griegos, no realizaron en toda la historia de su Imperio, contribuciones significativas a la matemática deductiva. La practicidad romana impedía que apreciasen las matemáticas griegas, con lo que comenzó un declive de esta ciencia que culminó con la destrucción de la Biblioteca de Alejandría. Esta situación, enlazó con la Edad Media y Occidente, acumulando mil años de estancamiento en el avance científico.
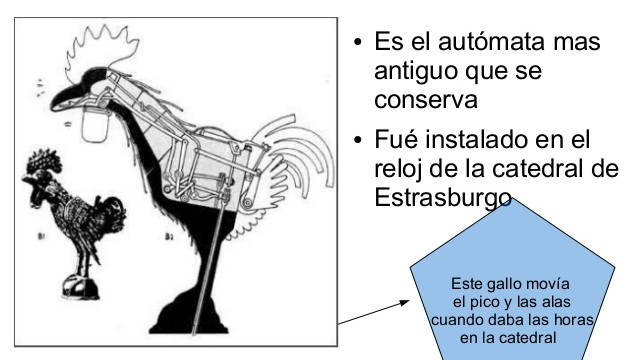
Así, en el Renacimiento se retomó el espíritu griego y se continuó con el avance de los automatismos, iniciado por Archytas. Coincidió con el nacimiento del gremio de los maestros relojeros, que proporcionaron el saber y la tecnología para la confección de mecanismos más complejos, lo que proporcionó una nueva dimensión a la creación de ingenios automáticos. Referencias de automatismos que han llegado hasta nuestros días son: el «Hombre de Hierro» de Alberto Magno (1204-1282) o la «Cabeza Parlante» de Roger Bacon (1214-1294). Aunque el más significativo, y que se conserva en la actualidad, es el gallo que formaba parte del reloj de la Catedral de Estrasburgo, que al dar las horas movía el pico y las alas. Estuvo en funcionamiento desde 1352 hasta 1789.

Sin embargo, hay que ir a la referencia clásica del Renacimiento en lo que se refiere a muchas artes y la robótica: Leonardo Da Vinci (1452- 1519). A parte de toda la actividad desarrollada por este genio, en lo que a la robótica se refiere construyó el «León Mecánico» para su mecenas el rey Luis XII de Francia (1462 – 1515), que se abría el pecho con su garra y mostraba el escudo de armas del rey. Además de este ingenio robótico, también mediante el uso de un sistema de poleas dotaba de movimientos a armaduras de caballeros a modo de un verdadero robot antropomórfico.


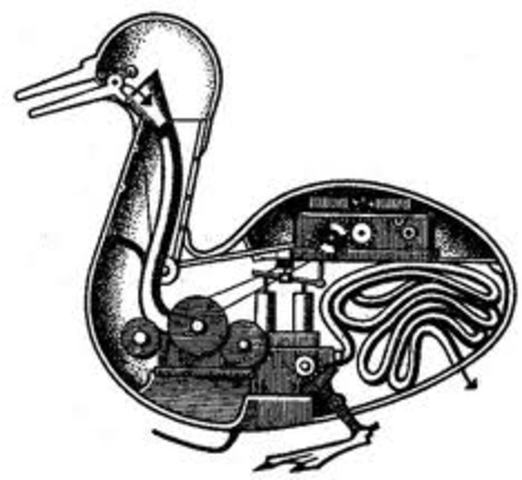
A partir de este momento creó autómatas orientados, fundamentalmente, a fines lúdicos. Desarrollados en su mayoría por el gremio de relojeros durante los siglos XVII y XVIII, se crearon ingenios mecánicos que tenían alguna de las características de los robots actuales, de suerte que representaban figuras humanas, animales o pueblos enteros. Así, en 1649, un artesano llamado Salomón Camus (1576-1626) construyó para el joven Rey Sol Luis XIV (1638 – 1715), un coche en miniatura con sus caballos, sus lacayos y una dama en su interior, de forma que todas las figuras estaban dotadas de movilidad. Por otro lado, Jacques de Vaucanson (1709-1782) construyó un pato mecánico que fue la admiración de toda Europa y descrito en su época como la pieza mecánica más maravillosa que se haya hecho. El pato alargaba su cuello para tomar el grano de la mano y luego lo tragaba para digerirlo por disolución y se conducía por unos tubos hacia el ano, donde había un esfínter que permitía evacuarlos. A esta función fisiológica, el ingenio añadía la capacidad de graznar y chapotear imitando los gestos de un pato real. Vaucanson, además, construyó otros muñecos animados entre los que destaca un flautista capaz de interpretar melodías.

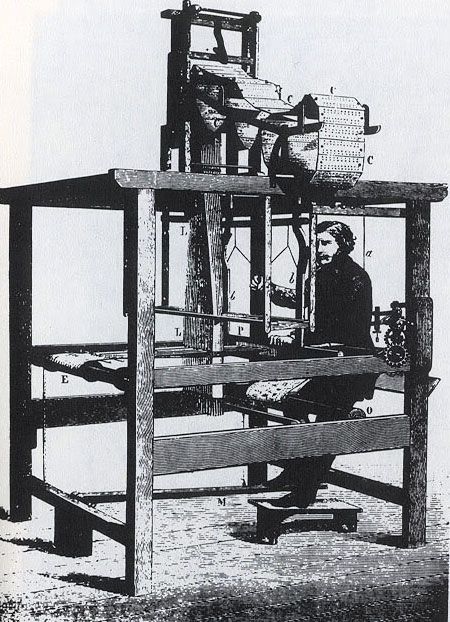
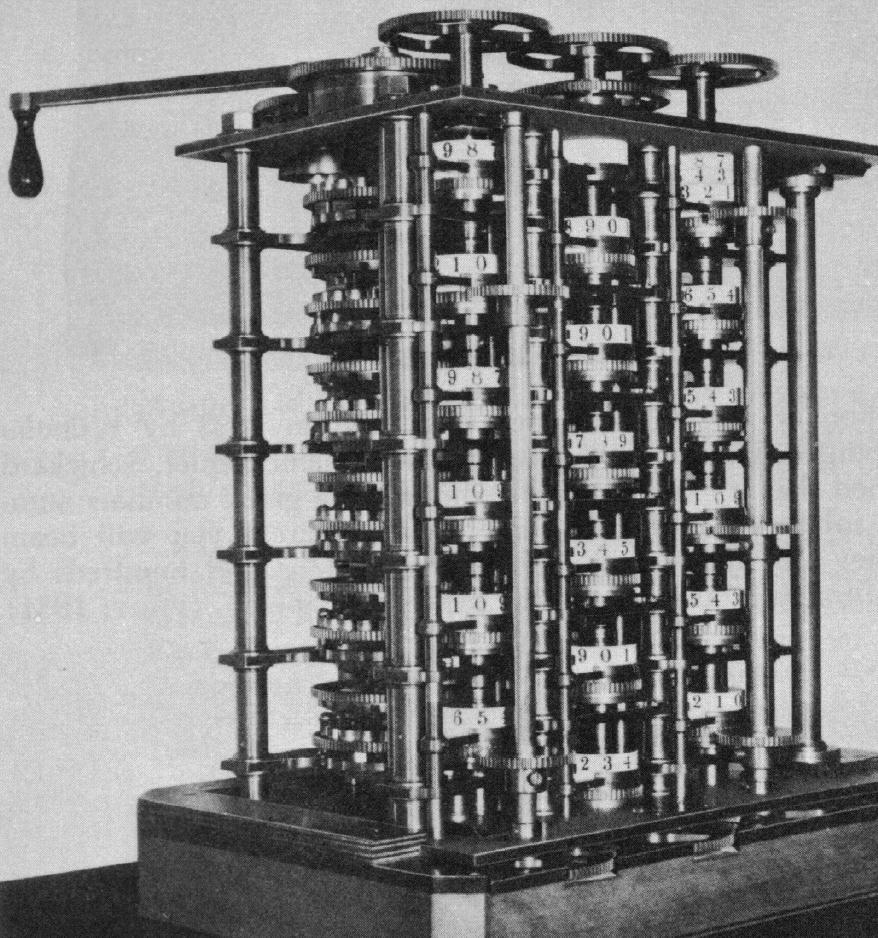
Con la Revolución Industrial que comenzaba en la segunda mitad del siglo XVIII y que llegaría hasta el siglo XIX, se buscan los aspectos más prácticos de los autómatas, dejando en un segundo plano los fines lúdicos ya desarrollados en los siglos precedentes. Ya no se buscaba que el autómata realizara la misma secuencia de movimientos una y otra vez, sino que se buscó una manera de programación. Se deseaba diseñar máquinas que se comportaran de distinta forma en función del programa que se les introducía. Esto constituye un avance más hacia la concepción del robot actual. Joseph Marie Jacquard (1752-1834), un tejedor y comerciante francés, aplicó los principios desarrollados por Vaucanson en telares desarrollados en la época para dotarlos de una programación fundamentada en tarjetas perforadas. Es decir, mediante la selección de un conjunto de tarjetas, se definía el tipo de tejido que se deseaba confeccionar. De este modo, construyó la primera máquina programable de la historia, sembrando el paradigma de la teoría computacional, conocimientos que fueron recogidos por Charles Babbage (1753-1827), para la creación de su «Máquina Diferencial», la primera calculadora mecánica del mundo diseñada para el cálculo automático de tablas de logaritmos.
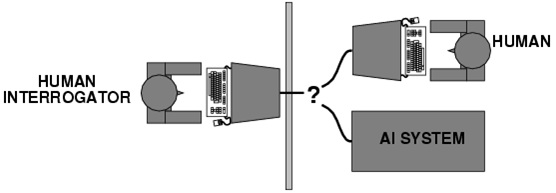
En este punto, se produce un salto en el que el automatismo, deja de repetir los ciclos fijos de los movimientos previstos en base a su diseño y se introduce la capacidad de poder ser programado para la realización de unas actuaciones concretas. Constituye un paso adelante para llegar a la concepción actual de robot; de suerte que si bien hasta el momento se ha trabajado en desarrollar su cuerpo en lo que a la movilidad se refiere, ahora se incluye también el primer atisbo de razonamiento automático. Y la evolución de la ciencia y de la técnica quiso que el desarrollo del razonamiento automático en las máquinas, conocido más comúnmente como “inteligencia artificial”, viese la luz antes del nacimiento oficial del primer robot. En efecto, la publicación del artículo “Computing machinery and intelligence” de Alan Turing (1912-1954), en 1950 (Turing, 1950), inicia esta nueva rama de la ciencia casi un lustro antes de la otra ciencia que conocemos hoy por “robótica”. Aunque Turing tenía una formación matemática, en el artículo antes nombrado, explora su faceta de filósofo planteando la posibilidad de que las máquinas aprendan o piensen por sí mismas, estableciéndose el famoso “Test de Turing” (prueba que se utiliza para dilucidar si estamos en presencia de una máquina pensante o no). Su funcionamiento se basa en un juego mediante el cual una persona entrevista por escrito a otras dos que están situadas en habitaciones separadas, sin contacto visual alguno entre ellas. Un entrevistado es hombre y el otro, mujer; el entrevistador usando las respuestas a sus preguntas tiene que averiguar el sexo de cada entrevistado. Pues bien, el “Test de Turing”, consiste en sustituir a uno de los entrevistados por una máquina y si el entrevistador no puede dilucidar quién no es el humano, entonces se está ante la presencia de una inteligencia artificial.
Hay que esperar hasta 1956 para que se produzca de manera oficial la primera definición de robot. Esta viene derivada de la patente de una máquina realizada en el mencionado año por el ingeniero, inventor y empresario americano George Devol (1912-2011). En efecto, tras trabajar en Cinephone United Corporation y con la experiencia adquirida durante la Segunda Guerra Mundial desarrollando contramedidas para radar, decide fundar su propia compañía dedicada a este tipo de tecnologías. A finales de los años 40, su interés se centraba en el diseño de una máquina que se adaptase a los requerimientos de la cadena de fabricación, que fuese de uso fácil y automática. Todo para mejorar la eficiencia productiva. Para ello, mezcló dos tecnologías que habían estado separadas hasta entonces: los manipuladores para el manejo de material radiactivo y las máquinas de control numérico. Los primeros eran brazos mecánicos gobernados remotamente por un operador humano y desarrollados fundamentalmente para el tratamiento de material radiactivo. Por otro lado, las máquinas de control numérico son fresadoras o torneadoras que funcionan siguiendo una secuencia de coordenadas espaciales, previamente introducidas, que definen la forma que se le dará a la pieza.
De este cóctel resultó su patente que denominó “Programmed article transfer”. Se trataba de un brazo articulado capaz de mover objetos de un lugar a otro siguiendo un programa introducido con antelación. De ahí la definición: “Manipulador programable multifuncional, diseñado para mover material, piezas o dispositivos especializados a través de movimientos variables programables para realizar un gran conjunto de tareas” (Devol, 1961). Con esta invención se unieron los dos ingredientes que constituyen la idea de robot, a saber, su aspecto físico en forma de aparato electromecánico y la inteligencia.
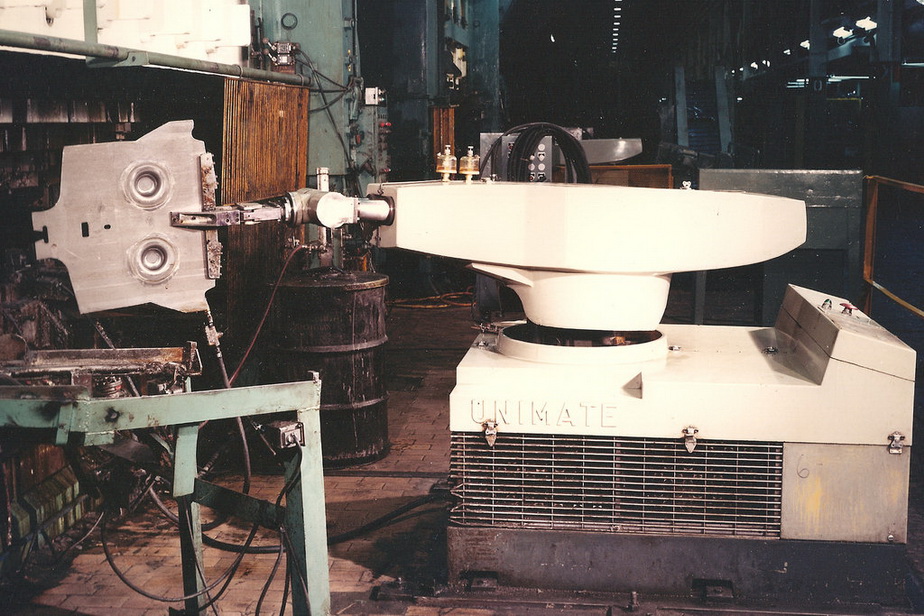
Pero la historia no acaba aquí. Posteriormente, George Devol junto con Joseph Engelberger (1925-2015), director de ingeniería por entonces de la división aeroespacial de la empresa Manning Maxwell y Moore en Stanford, deciden fundar la compañía Unimation (Universal Automation) para comercializar el ingenio recién patentado.
La casualidad quiso que el cofundador Engelberger fuese un gran fan de Isaac Asimov (1920 – 1992), que ya había publicado su recopilación de cuentos cortos “Yo, robot” y rebautizó a la máquina para la transferencia de artículos como robot. Y en verdad era un nombre acertado para los propósitos de la nueva empresa: “la automatización universal”, ya que consiguió crear un autómata cuyos movimientos se definían a través de un programa con el objeto de sustituir a un operador humano en diferentes tareas, tanto físicas como mentales. Esto enlaza con el origen de la palabra robot. Aparece en la obra de teatro “Rossum Universal Robots (RUR)” de 1920 del autor checo Karel Capec (1890 – 1938). En ella se describe la rebelión de unos seres creados artificialmente que trabajaban como esclavos en la empresa RUR. En esta obra de teatro, estos esclavos o robots (término que proviene de la palabra checa robotta, que significa “trabajos forzados”) eran pintados como seres humanos. Sin embargo, en la puesta en escena se optó porque los actores, que interpretaban a estos esclavos, se vistieran con el típico disfraz en forma de caja metálica grande como cuerpo y pequeña para la cabeza, imagen que ha influido tanto en las primeras películas de ciencia ficción con apariciones de robots.
A partir de aquí nace la ciencia y la tecnología de la robótica, que se fundamenta tanto en los principios establecidos por Devol de un carácter muy tecnológico con los presentados por Turing, muchos más científicos. Esta combinación hace única la robótica, que se mueve por una senda que combina la teoría con la practicidad, de suerte que no se entiende una sin la otra. Algunos autores establecen que realmente un robot no es un conjunto de ecuaciones, sino algo real que contiene articulaciones, motores, cables y sensores y que interacciona con el mundo real. Asimismo, apostillan que la teoría en robótica es lo que todo el mundo sabe y no funciona y que la práctica en robótica es lo que funciona, pero nadie puede explicarlo. Todo este componente práctico ha influenciado en cómo han evolucionado los robots desde Devol, siempre centrándose en resolver problemas del mundo real. Primero empezaron en la industria, fundamentalmente en la automovilística, para después salir de estos ámbitos e ir introduciéndose poco a poco en nuestra vida diaria.